Recall that a topological space is second countable if it has a countable basis.
Topological Manifolds
Def
A topological space is locally Euclidean of dimension n if every point has a neighborhood such that there is a homeomorphism . We call the pair a chart, a coordinate neighborhood or coordinate open set and a coordinate map or coordinate system on .
Def
A topological manifold is a Hausdorff, second countable, locally Euclidean space.
Example: The Euclidean space is covered by a single chart . Hence is an -dimensional topological manifold.
Example: The graph of in is a topological manifold. Since it is a subspace of , it is Hausdorff and second countable. The homeomorphism shows that it is locally Euclidean.
Example: The two axes in with the subspace topology is not a topological manifold due the intersection at the origin. Indeed, assume the axes were locally Euclidean at the origin. Then their is a neighborhood of the origin homeomorphic to an open ball . Notice that has four connected components, whereas has one. Therefore, they are not homeomorphic.
In order for the definition of manifold to be well defined, we need to ensure that every neighborhood is homeomorphic to a open set in for the same degree . This is known as the invariance of dimension and is true.
Compatible Charts
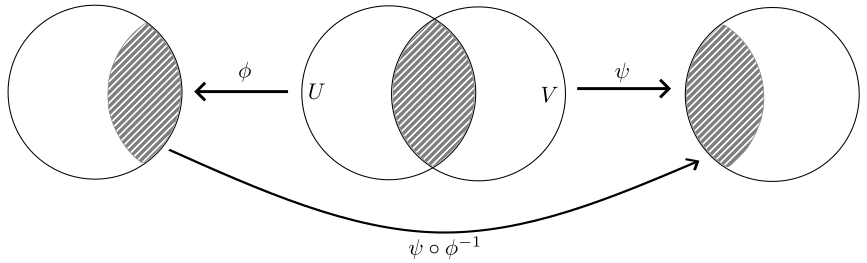
Let and be charts. Since and are open, it follows that is open. Moreover, since and are homeomorphisms, it follows that and are open.
Def
Two charts and are -compatible if the two transition maps
are . If the two charts do not intersect, they are automatically -compatible.
Some authors use for .
Def
A atlas on a locally Euclidean space is a collection of pairwise -compatible charts that cover , i.e., .
Example: The unit circle can be viewed as the complex subset
Define the two open subsets
Define the coordinate maps
One may show that and are charts on . The intersection consists of two connected components:
and
The transition maps are given by
and
Therefore, and form a atlas on .
-compatible is not an equivalence relation. While it is reflexive and symmetric, it is not necessarily transitive.
We say a chart is compatible with an atlas if it is compatible with all the charts of the atlas.
Lemma
Let be an atlas on a locally Euclidean space. If two charts and are both compatible with the atlas, then they are compatible with each other.
Proof: Let . Note there is some such that . Thus, . So
is on . This holds for all . Therefore, is on . A similar argument holds for .
Q.E.D.
Smooth Manifolds
An atlas is considered maximal if it is not contained in a larger atlas.
Def
A smooth or -manifold is a topological manifold together with a maximal atlas. The maximal atlas is called a differentiable structure on .
In practice, one only needs to find any atlas to show a topological manifold is a smooth manifold.
Prp
Any atlas on a locally Euclidean space is contained in a unique maximal atlas.
Proof: Adjoin all charts that are compatible with . The resulting atlas is maximal and unique.
Q.E.D.
To show a topological space is a smooth manifold it suffices to check that
- is Hausdorff and second countable
- has a atlas.
Let be the standard coordinates on . For a chart we let be the -th component of and write . We call the functions coordinates or local coordinates on .
Examples of Smooth Manifolds
Example: The Euclidean space is a smooth manifold with the chart where are the standard coordinates on .
Example: Any open subset of a manifold is also a manifold under the subspace topology. Let be an atlas for , and notice that forms an atlas for .
Example: In a manifold of dimension zero, every singleton subset is homeomorphic to and hence open. So every zero-degree manifold is a discrete set.
Example: For a subset and function , we define the graph of to be the subset
Consider an open subset and assume that is on . Then the map
and the map
are continuous and inverses of each other. Hence, they are homeomorphisms. Therefore, the graph of a function is a manifold with the atlas comprised of a single chart, .
Example: Notice that is isomorphic to . Hence we can give the topology of to . The general linear group is the set of invertible matrices:
Since is continuous, the general linear group is an open subset of . Therefore, it is a manifold of dimension by our second example.
By similar reasoning, the complex general linear group is also a manifold of dimension .
Prp
If and are atlases for manifolds and of dimensions and , respectively, then the collection
of charts is a atlas on . Therefore, is a manifold of dimension .
Proof: Recall that the product of Hausdorff spaces are Hausdorff. Moreover, the product of second countable spaces are second countable. Hence we simply show that the above collection forms a atlas.
Let and be overlapping charts. Notice that
Since is an atlas for , is . Likewise, is . Therefore, the product of the two is . An identical argument holds for the opposite transition map.
Therefore, is a manifold of dimension .
Q.E.D.
Example: As a consequence of the previous proposition, the infinite cylinder and the torus are smooth manifolds. Moreover, the -dimensional torus is also a manifold.
For dimensions less than 4, every topological manifold has a unique differentiable structure. In dimensions greater than 4, every compact topological manifold has a finite number of differentiable structures. Nothing is known about dimension 4.
Smooth Poincare conjecture
has a unique differentiable structure.
As shown by Michel Kervaire, there exists topological manifolds with no differentiable structure, i.e., there are topological manifolds that are not .